
- Sách Giáo Khoa Vật Lý 12
- Giải Vật Lí Lớp 12
- Giải Vật Lí Lớp 12 Nâng Cao
- Giải Sách Bài Tập Vật Lí Lớp 12
- Sách Giáo Viên Vật Lí Lớp 12
- Sách Giáo Viên Vật Lí Lớp 12 Nâng Cao
- Sách Bài Tập Vật Lí Lớp 12
- Sách Bài Tập Vật Lí Lớp 12 Nâng Cao
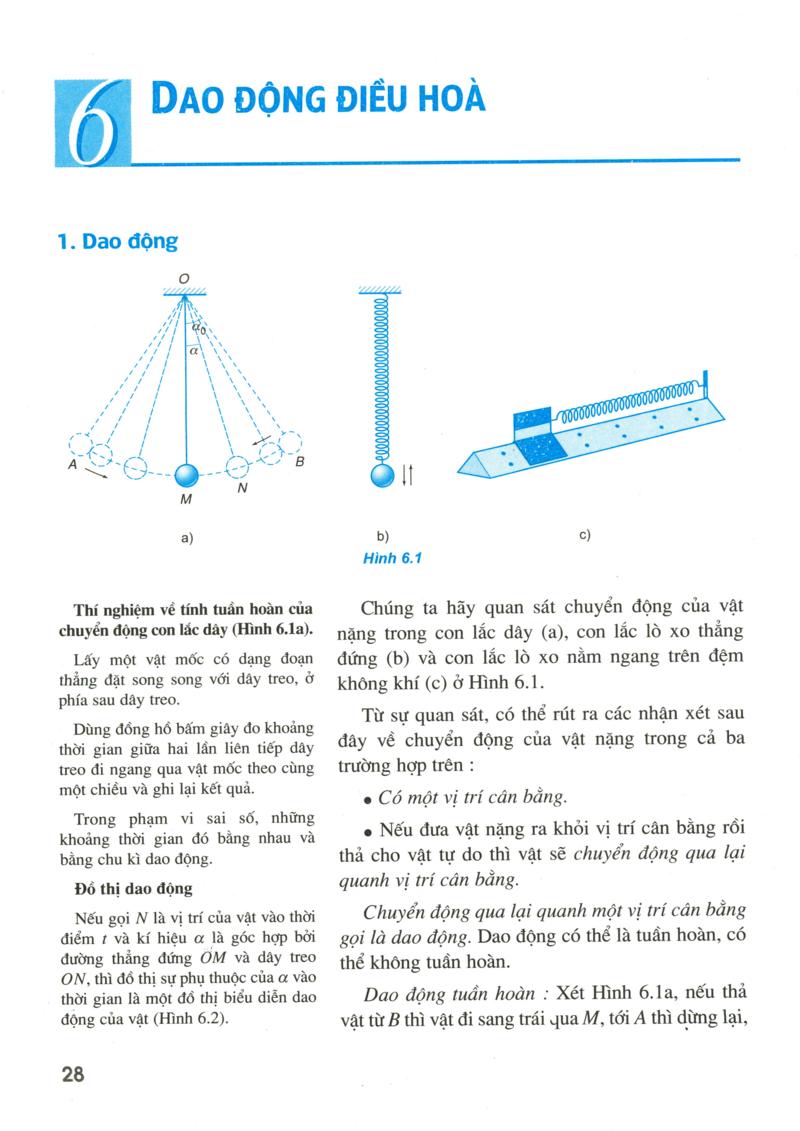
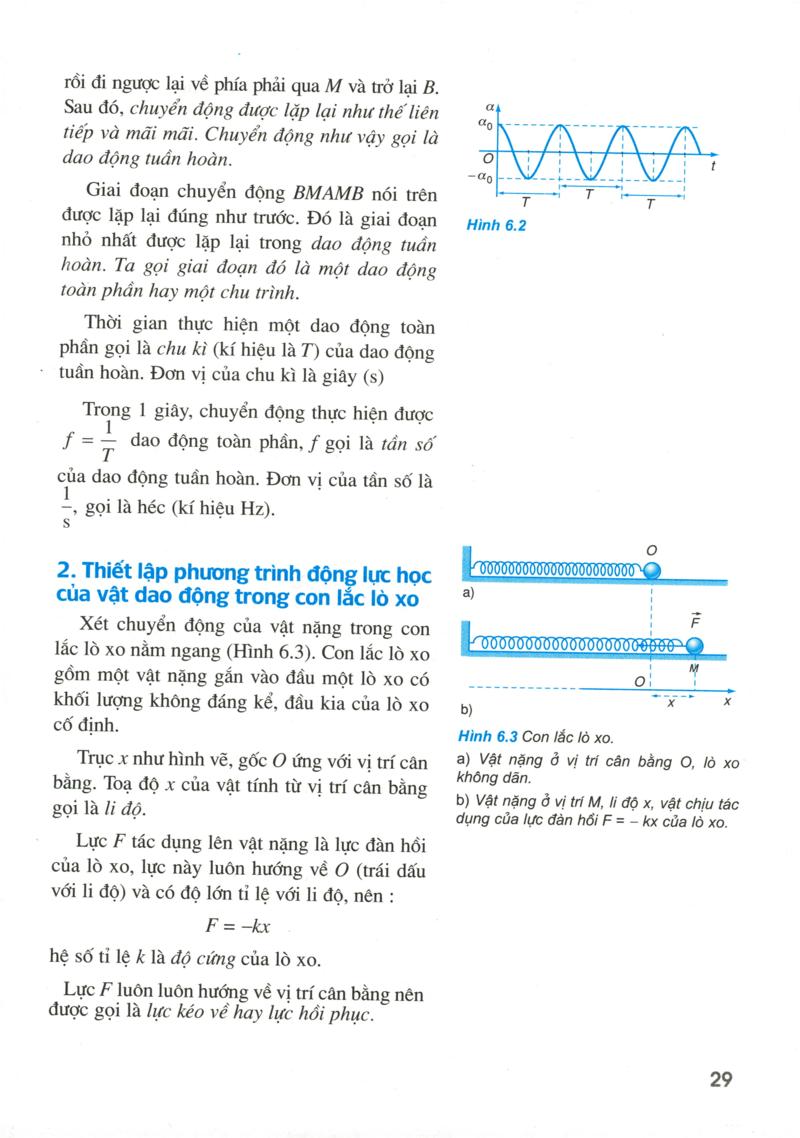
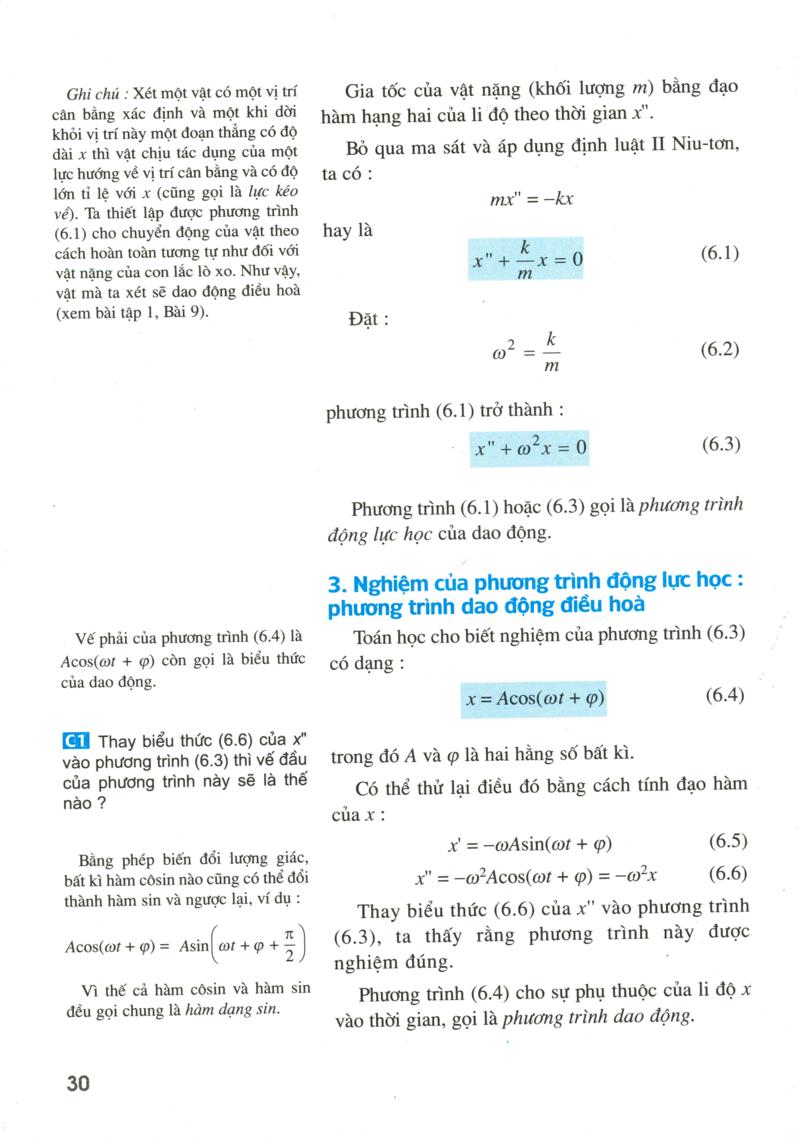

Thí nghiệm về tính tuần hoàn của chuyển động con lắc dây (Hình 6,1a). Lấy một vật mốc có dạng đoạn thẳng đặt song song với dây treo, ở phía sau dây treo. Dùng đồng hồ bấm giây đo khoảng thời gian giữa hai lần liên tiếp dây treo đi ngang qua vật mốc theo cùng một chiều và ghi lại kết quả. Trong phạm vi sai số, những khoảng thời gian đó bằng nhau và bằng chu kì dao động. Đô thị dao động Nếu gọi N là vị trí của vật vào thời điểm I và kí hiệu a là góc hợp bởi đường thẳng đứng OM và dây treo ON, thì đồ thị sự phụ thuộc của a vào thời gian là một đồ thị biểu diễn dao động của vật (Hình 6.2).28Hình 6,1Chúng ta hãy quan sát chuyển động của vật nặng trong con lắc dây (a), con lắc lò xo thẳng đứng (b) và con lắc lò xo nằm ngang trên đệm không khí (c) ở Hình 6.1.Từ sự quan sát, có thể rút ra các nhận xét sau đây về chuyển động của vật nặng trong cả ba trường hợp trên :• Có một vị trí cân bằng.• Nếu đưa vật nặng ra khỏi vị trí cân bằng rồi thả cho vật tự do thì vật sẽ chuyển động qua lại quanh vị trí cân bằng.Chuyển động qua lại quanh một vị trí cân bằng gọi là dao động. Dao động có thể là tuần hoàn, có thể không tuần hoàn.Dao động tuần hoàn : Xét Hình 6.1a, nếu thả vật từ B thì vật đi sang trái qua M, tới A thì dừng lại, rồi đi ngược lại về phía phải qua M và trở lại B. Sau đó, chuyển động được lặp lại như thế liên tiếp và mãi mãi. Chuyển động như vậy gọi là dao động tuẩn hoàn. Giai đoạn chuyển động BMAMB nói trên được lặp lại đúng như trước. Đó là giai đoạn nhỏ nhất được lặp lại trong dao động tuẩn hoàn. Ta gọi giai đoạn đó là một dao động toàn phẩm hay một chu trình. Thời gian thực hiện một dao động toàn phần gọi là chu kì (kí hiệu là T) của dao động tuần hoàn. Đơn vị của chu kì là giây (S)Trong 1 giây, chuyển động thực hiện được f = dao động toàn phần, f. gọi là tần số của dao động tuần hoàn. Đơn vị của tần số là *, gọi là héc (kí hiệu Hz). S2. Thiết lập phương trình động lực học của vật dao động trong Con lắc lò xo Xét chuyển động của vật nặng trong con lắc lò xo nằm ngang (Hình 6.3). Con lắc lò xo gồm một vật nặng gắn vào đầu một lò xo có khối lượng không đáng kể, đầu kia của lò xo cố định. Trục x như hình vẽ, gốc O ứng với vị trí cân bằng. Toạ độ Y của vật tính từ vị trí cân bằng gọi là li độ. Lực F tác dụng lên vật nặng là lực đàn hồi của lò xo, lực này luôn hướng về O (trái dấu với li độ) và có độ lớn tỉ lệ với li độ, nên : F = -kx hệ số tỉ lệ k là độ cứng của lò xo. Lực Fluôn luôn hướng về vị trí cân bằng nên được gọi là lực kéo về hay lực hồi phục.Hình 6,2Hình 63 Con lắc lò xo. a) Vật nặng ở vị trí cân bằng O, lò xo không dãnb) Vật nặng ở vị trí M. II độ x, vật chịu tác dụng của lực đàn hồi F = -kx của lò xo.29 dài x thì vật chịu tác dụng của một lực hướng về vị trí cân bằng và có độ lớn tỉ lệ với x (cũng gọi là lực kéo về). Ta thiết lập được phương trình (6.1) cho chuyển động của vật theo cách hoàn toàn tương tự như đối với vật nặng của con lắc lò xo. Như vậy, vật mà ta xét sẽ dao động điều hoà (xem bài tập 1, Bài 9).Vế phải của phương trình (64) là Acos(of + (p) còn gọi là biểu thức của dao động.Thay biểu thức (6,6) của x” vào phương trình (6.3) thì vế đầu của phương trình này sẽ là thế nào ?Bằng phép biến đổi lượng giác, bất kì hàm côsin nào cũng có thể đổi thành hàm sin và ngược lại, ví dụ:Acos(aot + (p) = Asia(o + (p + 3)thế cả hàm cÔsin và hàm sin đều gọi chung là hàm dạng sin.30Gia tốc của vật nặng (khối lượng m) bằng đạo hàm hạng hai của li độ theo thời gian x”.Bỏ qua ma sát và áp dụng định luật II Niu-tơn, ta có:mix” = -kx hay là x + A. = 0 (6.1) ሥገገ Đặt o’ = . (6.2) m phương trình (6.1) trở thành: r” + or = 0 (6.3)Phương trình (6.1) hoặc (6.3) gọi là phương trình động lực học của dao động.3. Nghiệm của phương trình động lực học:phương trình dao động điều hoà Toán học cho biết nghiệm của phương trình (6.3) dạng:x = Acos(cot + (p) (6.4)trong đó A và q) là hai hằng số bất kì.Có thể thử lại điều đó bằng cách tính đạo hàm của Y:x = -a)Asin(ot + p) (6.5)(6.6)Thay biểu thức (6.6) của x” vào phương trình (6.3), ta thấy rằng phương trình này được nghiệm đúng.Phương trình (64) cho sự phụ thuộc của li độ x. vào thời gian, gọi là phương trình dao động.x” = -aolAcos(ot + (p) = -oxDao động mà phương trình có dạng (6.4), tức là vế phải là hàm côsin hay sin của thời gian nhân với một hằng số, gọi là dao động điều hoà.4. Các đại lượng đặc trưng của dao động điều hoà Với giá trị của A dương trong (6.4): – A gọi là biên độ, đó là giá trị cực đại của li . Nếu trong (64), giá trị của 4 âm thì:ta viết lại như sau – – – ܦ . i ་་་་་་་་་་་་་ lúc cos(of + (p) = 1. Biên độ luôn x = A cos(cot + (p) = -|Alcos(aot + (p)= A s (of + (p) gọi là pha của dao động tại thời Alcosot + (p +t)điểm t, pha chính là đối số của hàm côsin và là Biên độ dao động điều hoà là А một góc. Với một biên độ đã cho thì pha Xác định (luôn luôn dương) và pha ban đầu là li độ x của dao động. (р + л. > (p là pha ban đầu, tức là pha (ot + (p vào thời điểm t = 0. • () gọi là tần số góc của dao động. () là tốc độ biến đổi của góc pha, có đơn vị là rad/s hoặc độ/s. Với một con lắc lò xo đã cho thì tần số góc () chỉ có một giá trị xác định cho bởi (6.2).5. Đồ thị (li độ) của dao động điều hoàXuất phát từ phương trình dao động (6.4), cho Bảng 6.1 (p = 0 để đơn giản. Lập bảng biến thiên của li độ Biến thiên của X theo t x theo thời gian t (xem Bảng 6.1) và vẽ đường biểu diễn x theo I (Hình 6.4). Từ đồ thị ta thấy rằng, dao động điều hoà là chuyển động tuần hoàn.t aotAAAAT-AHình 64. Đường biểu diễn x = Acos(ot + (p) với g = 0. டகி. பி. 1 ம் :۔۔ :eد حلاء ح۔ ق : لی۔ ۔ ۔ کھو:Ảlà giá trị cực đại của lĩ độ x.31 Chứng minh tính chất tuần hoàn:Vào thời điểm I bất kì, vật có lĩ độ cho bởi (6.4).Vào thời điểm t + T vật có li độ :at T = ( )2爪 Asoo = A cos(cot + 2n + (p) = Acos(cot + (p) = x(t)đúng bằng li độ vào thời điểm . Điều này chứng tỏ rằng T=*cũng là chu kì của dao động điều hoà.Ba đại lượng: chu kì T, tần số f: và tần số góc (9 liên quan với nhau theo (6.7) và (6-8) cùng đặc trưng cho một tính chất biến đổi nhanh hay chậm của pha. Chỉ dùng một trong ba đại lượng đó là đủ.T Hình 65 Đổ thị vận tốc và đồ thị II độ (pha ban đầu (p +0).Trục hoành biểu diễn thời gian t Nếu trục tung biểu diễn lị độ x thì đường liền nét (2) biểu diễn x theo t (đồ thị li độ). Nếu trục tung biểu diễn vận tốc U thì đường đứt nét (1) biểu diễn U theo t (đồ thị vận tốc).Khi t’=t, thì x = 0, U = Umax = (OA.TKhi s=a+五=。thì x = \max = A, D = 0.326. Chu kì và tần số của dao động điều hoàTừ đồ thị li độ của dao động điều hoà (Hình 6,4) ta thấy rằng, nếu tịnh tiến đoạn đồ thị (0, ) một đoạn theo trục t, ta sẽ được đoạn đồ thị tiếp theo. Như vậy, giai đoạn chuyển động từ thời điểm f = 0 đến thời điểm 1 = là giai đoạn ngắn nhất được lặp lại liên tục và mãi mãi, đó là một dao động toàn phần hay một chu trình. Thời gian 27t thực hiện dao động toàn phần là chu kì T của ဒါး động điều hoà.T = TTT (6.7) Tần số f 4ے độ : è l l đị l ghĩ là – f=呈=学 (6.8) T 27.7. Vận tốc trong dao động điều hoàVận tốc bằng đạo hàm của li độ theo thời gian:U = x’ = -CoA sin(aot + (p) oAeos(or + (p + 😉 (6.9)như vậy là vận tốc cũng biến đổi điều hoà và có cùng chu kì với li độ. Đồ thị vận tốc (đường đứt nét) đối chiếu với đồ thị li độ (đường liền nét) được vẽ trên Hình 6.5.Chú ý rằng :Ở vị trí giới hạn x=+A thì vận tốc có giá trị bằng 0.Ở vị trí cân bằng x=0 thì vận tốc U có độ lớn cực đại bằng (OA. 8. Gia tốc trong dao động điều hoàGia tốc a bằng đạo hàm của vận tốc theo thời gian :α = υ” = x’ = —о”А cos(Cot + (p) = -o’x (6.10)Gia tốc luôn luôn trái dấu với li độ và có độ lớn tỉ lệ với độ lớn của li độ. Người ta nói rằng, gia tốc ngược pha với li độ.9. Biểu diễn dao động điều hoà bằng vecto quayĐể biểu diễn dao động điều hoà (64) người ta dùng một vectơOM có độ dài là A (biên độ), quay đều quanh điểm O trong mặt phẳng chứa trục Ox với tốc độ góc là ao. Ở thời điểm ban đầu t=0, góc giữa trục Ox và OM là ọ (pha ban đầu) (Hình 6.6).Ở thời điểm t, góc giữa trục Ox và OM sẽ là () t + () (Hình 6.7), góc đó chính là pha của dao động.| Độ dài đại số của hình chiếu vectơ quay OM trên trục x sẽ là:ch, OM = OP = Acos(ot + (0) (6.11) đó chính là biểu thức trong vế phải của (6.4) và là li độ Y của dao động.Như vậy. Độ dài đại số của hình chiếu trên trục x của vectơ quay OM biểu diễn dao động điều hoà chính là li độ x của dao động.10. Điều kiện ban đầu : sự kích thích dao động Xét một vật dao động, ví dụ vật nặng trong con lắc lò xo. Trong bài trước, ta đã tìm được phương trình dao động của vật, trong đó có hai2-wl 12NC-aGhi Chú :Từ (6.4) và (69), ta thấy rằng lĩ độ \ và vận tốc U đều là hàm côsin với cùng tần వర్ణ góc (), pha ban đầu của U là Ф+ 5, lớn hơn pha ban đầu của \. Người ta nói rằng vận tốc U sớm pha * so với lị độx, hoặc li độ Y trễ pha s so với vận tốc U.صےHình 6,6 Vectơ quay vào thời điểmHình 6.7. Vectơ quay vào một thời điểm t bảt kl.Đẳng thức (6.11) cũng thể hiện mối quan hệ giữa dao động điều hoà và chuyển động tròn đều: Điểm P dao động điều hoà trên trục Ox với biên đội A và tân số góc (9 có thể coi như hình chiếu lên O\ của một điểm M chuyển động tròn đều với tốc độ góc (o trên quỹ đạo tròn tâm O. bán kính A. Trục OY trùng với một đường kính của quỹ đạo đó.33 Ví dụ : Vẽ vectơ quay biểu diễn dao độngA = 5 cos 0,5 t -플 (cm)vào thời điểm r = 0.Bài giải. Đó là vectơ OM có độ dài OM bằng 5 cm, (theo tỉ xích quy ước) và hợp với trục Y góc như ở Hình 6.8.MO X Hình 6.8. Vectơ quay biểu diễn dao động x. vecto OM quay đều quanh O với tốc độ góc (9 = 0.5 rad/s.2_CÂU HỞIhằng số A và (0. Trong một chuyển động cụ thể thì A và “p có giá trị xác định, tuỳ theo cách kích thích dao động. Giả thiết rằng vật nặng đứng yên ở vị trí cân bằng, nó sẽ đứng yên mãi. Tà có thể kích thích dao động của vật bằng cách đưa nó ra khỏi vị trí cân bằng một đoạn \0 rồi thả tự do (vận tốc ban đầu bằng 0). Dưới tác dụng của lực đàn hồi của lò xo, vật sẽ dao động. Nếu chọn gốc thời gian t = 0 là lúc thả vật tự do ở li độ \0, ta sẽ có điều kiện ban đầu sau đây: x(0) = \0 và U(0) = 0 (6.12) Cho t = 0 trong công thức (6.4) của li độ Y và trong công thức (69) của vận tốc, thì: x(0) = Acos(p = Ao U(0) = —(OAsinqp = 0 Từ phương trình sau, ta suy ra sinçp = 0. (p=0. Thay vào phương trình trước, ta có A =\0 Vậy, phương trình của dao động điều hoà được kích thích như trên sẽ là:x = Xocos(ot (6.13)1. Vẽ đồ thị li độ của dao động điều hoà sau đây (cùng dạng Với đường liền nét (2) trong Hình 65): X = 2cos(itt- ) (Cm)^ மக – 4A AA “ضر۔ ۔ 4ر حصے ۔ܬܐ:uܝ . .±:ܥܝܐVới trục tung (X) hoành (0.2. Xét ba đại lượng đặc trưng A (p, (9 cho dao động điều hoà của một con lắc lò xo đã cho. Những đại lượng nào có thể có những giá trị khác nhau, tuỳ thuộc cách kích thích dao động ? Đại lượng A بر 4خر ܡܰ ܚ ܬܚܐs: طحے:4ر حسیکریں:سے 4خرs :حطم كلار ܫܶ1 ܫ ܫܰ1 یہی رہ:عربی3. Nói rõ về thứ nguyên của các đại lượng A, (p, (9.堕 BAI TÂP1 TẤc AA của chất điểm r!A || độ cực đại34t.A.. km. AB. gia tốc Cực đại.~ ~ ~ai LokaC. lĩ độ bằng 0. D. pha bằng2-VL12NC-B2. Gia tốc của chất điểm dao động điều hoà bằng 0 khi A. lĩ độ cực đại. B. li độ cực tiểu. C. Vận tốc Cực đại hoặc cực tiểu. D. Vận tốc bằng 0.3. Dao động cơ điều hoà đổi chiều khi A. lực tác dụng đổi chiều. B. lực tác dụng bằng 0. C. lực tác dụng có độ lớn Cực đại D, lực tác dụng ngược chiều Với vận tốc. 4. a) Thử lại rằng: x = A, COScot+ Asinot (6.14)trong đó A4 và A2 là hai hằng số bất kì, cũng là nghiệm của phương trình (6.3), b) Chứng tỏ rằng, nếu chọn A4 và A2 trong biểu thức ở Vế phải của (6.14) như sau: = ACOSqp ; A2 = -Asingp thì biểu thức ấy trùng với biểu thức ở Vế phải của (64) . Phương trình dao động của một vật là: X = 6COs. 47tt + E) (Cm). a)Xác định biên độ, tần số góc, chu kì và tần số của dao động. b)Xác định pha của dao động tại thời điểm t = s, từ đó suy ra || độ tại thời điểm ấy. c) Vẽ vectơ quay biểu diễn dao động vào thời điểm t=0. 6. Một vật dao động điều hoà Với biên độ A = 4 cm và chu kì T = 2s.5а)b) Tỉnh lị độ của vật tại thời điểm t = 55 S.. Một vật nặng treo vào một lò xo làm cho lò xo dãn ra 0,8 cm. Cho vật dao động. Tim Chu kì dao động ấy. Lấy g = 10 m/s°.7Eiffm. Có biết: ?) CÂN Ở NỞ| KHÔNG CÔ TRONG LƯONG Để biết diễn biến sức khoẻ của nhà du hành vũ trụ, người ta theo dõi xem nhà du hành tăng cân hay giảm cân. Khi tập luyện trên mặt đất, bác sĩ dùng một cái cân thông thường để đo trọng lượng nhà du hành, rồi từ đó suy ra khối lượng. Khi bay trên Con tàu vũ trụ, nhà du hành ở trạng thái không trọng lượng, không có cân nào hoạt động được nữa. Vậy làm thế nào để đo khối lượng nhà du hành ? Lúc này phải dựa vào quán tính để đo khối lượng. Nhà du hành ngồi và buộc mình vào một cái ghế, ghế gắn vào đầu một lò xo, đầu kia của lò xo gắn chặt vào một điểm. Cho ghế dao động ở đầu lò xo. Một đồng hồ điện tử đo chu kì của dao động. Từ chu kì dao động có thể tính được khối lượng của nhà du hành (xem bài tập 4, Bài 9).